16th December 2020 | Author: Dr John Lindsay
研究に、そしてオックスフォード・インストゥルメンツで従事している間、私は様々なFIB-SEMとマニピュレーターの組み合わせを使用してきました。紙面上ではほとんど同じシステムですが、ユーザーとしての現実は大きく異なります。数時間かけて作成したサンプルにリスクを与えるため、リフトアウトを恐れていたシステムもあれば、リフトアウトだけで済むシステムもありました。ここでは良いマニピュレータを作るための様々な側面についてお話しします。
マニピュレーターを検討する際の共通の出発点は、モーターの種類です。最新のマニピュレーターの多くは圧電モーターを使用していますが、圧電モーターには複数のデザインがあります。オムニプローブのマニピュレーターは、複数の同期圧電素子を使用した独自のデザインを採用しています。 この設計により、他のマニピュレーターで採用されているスリップスティックモーターにありがちな動きのジャンプがなく、マニピュレーターの全可動域にわたってスムーズに連続的に動くことができます。 また、モーターの速度範囲が広いのも特徴です。 すべての速度で連続的に移動する能力の結果として、OmniProbe 400の最も遅い速度では、Z軸上の全範囲の移動を完了するのに509日以上(計算、テストはしていません)かかることを知ると興味を持たれるかもしれません。 最速の設定では数秒しかかかりません。
マニピュレーターの2つ目のポイントはエンコーダです。 エンコーダーは位置を測定し、この位置情報は保存位置を作成するために使用することができます。 収納された位置にあるプローブは、ワンクリックで格納された位置から使用可能な状態に素早く簡単に移動することができます。 これは右の画像でいただけます。 プローブの移動中に位置情報を使用することで(閉ループフィードバック)、信頼性の高い速度とステップ制御を実現します。
OmniProbeが格納位置から画像中央の保存位置に移動する様子
OmniProbeの特徴であるその他の設計パラメータは、ポートに取り付けられており、直線的な動きのために設計されていることです。 ポートへの取り付けは、サンプルサイズを制限したり、他の検出器と干渉しないようにするために重要です。 ポートに取り付けられているため、上のチャンバースコープのように顕微鏡から取り外す必要がなく、オムニプローブを邪魔にならないように収納することができます。 リニア設計は、マニピュレータのセットアップ(キャリブレーション)をより直感的に行うために重要であり、プローブが格納された際に他の検出器と衝突するリスクなく、チャンバーの外にまっすぐに移動することを意味します。
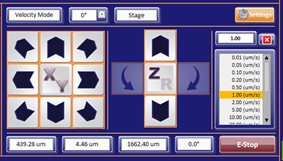
OmniProbeソフトウェアのモーションコントロールセクションでは、直感的な操作のために、モーション矢印が電子顕微鏡像に較正されています。
もちろん最高のハードでもソフトが揃わないと効果がありません。 すべてのOmniProbeには、直感的なソフトウェアコントロールが搭載されています。直感的なコントロールとは、モーションコントロールの矢印が電子顕微鏡像に合わせてキャリブレーションされていることを意味します(下の画像を参照してください)。 OmniProbeアプリケーションの詳細については、以前のブログを参照してください。 製品についての詳細をご希望の場合は、お問い合わせください。
お問い合わせはこちら