4th August 2021 | Author: Kim Larsen
大面積マッピング(Large Area Mapping, LAM)とは、AZtecの機能の一つで、単一視野でのデータ取得(画像取得またはマッピング)を、隣接する多くの視野で繰り返し行うことで、広い範囲をカバーすることができます。これにより、高い空間分解能を持つデータセットを取得できると同時に、ビームスキャンとステージの動きを組み合わせて、低倍率で全体像を把握することができます。 平坦なサンプルのEDS分析では、この機能は推奨のEDS分析ワーキングディスタンスで簡単に使用できます。しかしEBSD分析は70度という高傾斜で行われるため、データを収集する前に以下のような配慮が必要になります。:
- ステージやサンプルホルダー上でのサンプルの位置や向き
- ワーキングディスタンスの設定をどうするか?
- どの倍率で分析するか?
- 潜在的なキャリブレーションのステップ
サンプルの向き
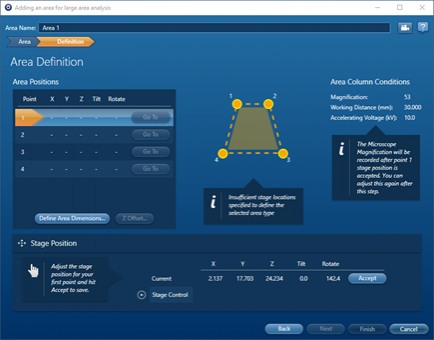
データ取得中、AZtecはサンプルを視野から視野へ自動的に移動させていますが、この移動が安全に行われるようにサンプルを配置することが重要です。 初期設定では、試料面の4点(x,y,z)が定義され、AZtecは、試料面に焦点を合わせるためにステージのz軸をどのように調整すべきかを計算し、x,y軸を動かしてステージを視野間で移動させます。 これは重要なことで、試料面がSEMステージに平行に取り付けられていないと、試料が焦点から外れてしまう可能性があるからです。
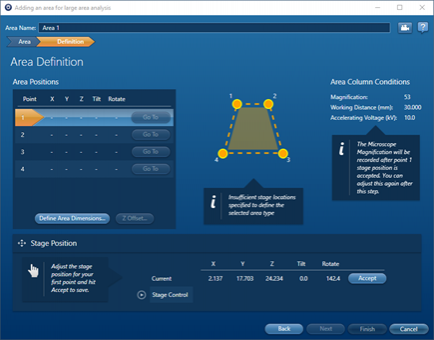
図 1 - AZtec LAMの設定ウィザード
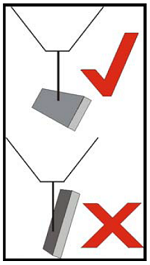
また細長いサンプルやサンプルマウントを扱う場合には、最長の方向がチルト軸に沿うようにサンプルをマウントすることが重要になります。 これにより、ポールピース方向への移動量が減り、SEMチャンバー内でのサンプルの移動がより安全になります。 プレチルトホルダーを使用している場合は、この点を覚えておくと、必要なZの動きを減らすことができます。推奨されるサンプルの向きを図2に示します。
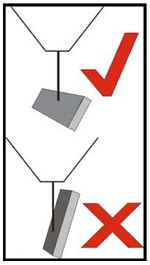
図 2 - SEMチャンバー内での細長いサンプルの推奨される向き。
ワーキングディスタンス
一般的には、分析に必要な空間分解能に基づいてワーキングディスタンスを選択するか、設置された検出器の位置に基づいて一般的な推奨ワーキングディスタンスを選択します。 しかし大面積マッピングでは、安全性やサンプルの移動に必要なスペースも考慮する必要があります。データ取得中、ワーキングディスタンスは一定に保たれます。つまり目的のエリアをカバーするためには、サンプルを十分に移動できるWDで分析を行う必要があります。 一般的に、大きなサンプルを分析する場合は、小さなサンプルを分析する場合よりも長いWDを使用する必要があります。実際の値は、SEM(ポールピースの形状)やセットアップ(検出器)によって異なりますが、目安としては、最小のWDはサンプルの幅に(ほぼ)等しい値になります。もう一度、図2に示された方向について考えてみましょう。
しかしSymmetry検出器のエレベーション制御を使用して検出器を配置し、より長いWDで良好な収集ジオメトリを得ることができるので、問題はありません。 また、エレベーション制御を使用することで、EDS検出器の信号を増やすことができます。 このことは、 Dr. Pat Trimbyによる以前のブログ記事. でも紹介されています。
倍率と信号強度の検討
単一視野の分析では、データに要求される空間分解能と、分析する領域の広さに応じて倍率を選択します。実用的な最低倍率は、一般的にSEMのカラムと低倍率の歪みの可能性によって制限されます。広大なエリアをマッピングする際には、特にEDSデータを同時に収集している場合、マッピングデータとの関連で倍率を考慮することが重要です。
ジオメトリにより、EDSの強度は1つの視野内で変化するため、隣り合ったマップをモンタージュすると、マップ間の強度差が目に見える形で現れることがあります。EDS検出器の推奨ワーキングディスタンスであるチルト0でEDSデータを収集した場合、強度変化は視野の中心を中心に対称となるため、通常はこの影響は見られません。しかし、ワーキングディスタンスを変えて高傾斜で分析すると、この対称性が保たれなくなり、立体角の変化に伴ってカウントレートの変化が見えるようになります。
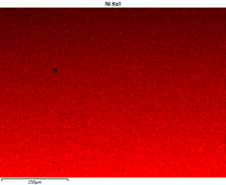
これは、必ずしも分析の問題ではありません。しかし高倍率での分析、EDS検出器の格納、開口部の大きなコリメーターの使用などにより、その影響を軽減することができます。 これにより、各視野内での立体角の変化を抑えることができます。 さらに、サンプルに対するEBSD検出器の位置を考慮します。 EBSDの検出器は、EDS信号を遮蔽してしまうことがあり、その結果、サンプルの物理的な上部では強度が高く、傾斜したサンプル上でビームが物理的に下方向に移動すると強度が低下するというグラデーションが発生します。 図3を参照してください。
また検出器の位置によっては、電子線像にも同様の効果が見られる場合があります。
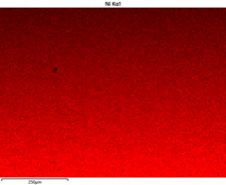
図 3 - ジオメトリ効果によるカウントレートの違い。ビームがサンプルの下部から上方に向かって走査されるため、視野の上部でカウントレートが高くなっていることがわかります。
倍率や検出器の位置など、最適な妥協点を見つけるには、一般的には、小さなテストマップを取得し、マップや画像の上下にある元素マップの強度を比較するのが最も早い方法です。
視野間のアライメント
AZtecでは、隣接する視野のデータをオーバーラップさせて収集するために、長さのスケールとステージの動きを正しく調整することが重要です。 これは、システムのインストール時に行われるので、一般的にはユーザーが心配する必要はありません。 この情報は、長さのスケールを計算するために使用され、その結果、チルト軸に垂直な方向のビームとステージの動きを計算するので、AZtecはサンプルのチルトを確実に把握する必要があります。
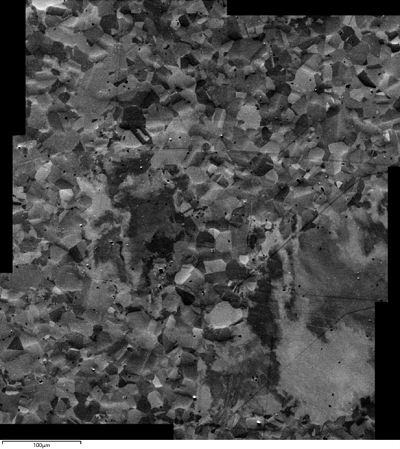
システムによっては、ビームの走査方向とステージの移動方向の関係が一定ではなく、ワーキングディスタンスや加速電圧によって変化するものもあります。 そのため、SEMの条件が変わると分析の間に変化したり、システムが最後に校正されたときと比べて変化している可能性があります。 この関係(スキャンローテーション)が一定でない場合は、図4のように隣り合った視野がずれてしまうため、モンタージュされたデータにはそれが現れます。
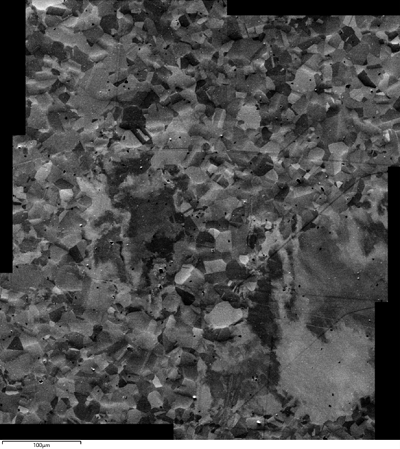
図 4 - スキャンローテーションの変更による視野のズレ。(2x3のモンタージュの端にある段差に注目)
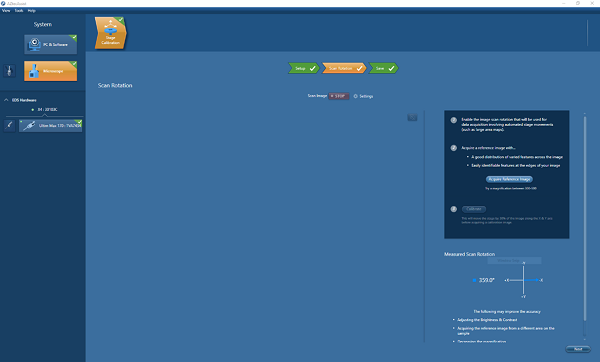
この問題を解決するために、ユーザー向けのキャリブレーションステップが用意されています。このステップでは、ステージをX方向に移動させながら、サンプル上の特徴を追跡します。このステップはAssistソフトウェアからアクセスできますが、ほとんどのシステムでは、SEMのキャリブレーションデータに基づいてSEMがスキャン方向を自動的に調整するため、このステップは必要ありません。さらにEBSD分析では、絶対的な方向性が正しいことを確認するために、サンプルアライメントプロセスの一環としてスキャンローテーション補正を調整し、大面積マッピングの視野間のアライメントを維持します。
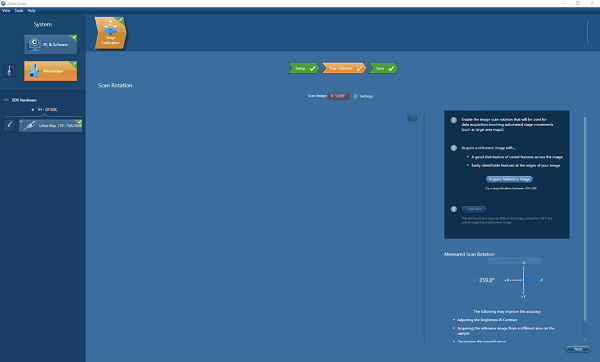
図 5 - ユーザーがステージを校正するステップでは、サンプルを1軸に沿って移動させ、画像相関を用いてステージのx,yの動きと電子線像の向きの関係を特定します。
大面積マッピングは、高い空間分解能を維持しながら、低倍率で広い範囲の概観を作成することができる便利な分析機能です。 この記事では、EBSDを使用して大面積マッピングを行う際に遭遇する問題と、その対策について概要を説明しましたが、いかがでしたでしょうか。